Non-linear Invariants for Control-Command Systems
Control theorists know for long that quadratic invariants, that is ellipsoids, are a good solution to bound the behavior of linear controllers, which constitute the heart of most control-command systems. They designed methods to synthesize such invariants using some convex optimization techniques, namely semidefinite programming solvers. The first part of this talk will briefly introduce those methods.
In practice, these techniques heavily rely on numerical computations performed using floating-point arithmetic, raising stringent soundness questions about their results. We will thus investigate solutions to formally validate such results and see that this is feasible with only a small overhead.
Finally, we present a simple implementation in the Alt-Ergo SMT solver and comparison with other state-of-the-art SMT solvers on non-linear real arithmetic benchmarks. We also introduce an implementation in the Coq proof assistant with a reflexive tactic enabling to automatically discharge polynomial inequalities proofs. Benchmarks indicate that we are able to formally address problems that would otherwise be untractable with other state-of-the-art methods.
[Slides]
- Séries:
- Microsoft Research Talks
- Date:
- Haut-parleurs:
- Pierre Roux
- Affiliation:
- ONERA
-
-

Tahina Ramananandro
Principal Research Software Development Engineer
-
-
Taille: Microsoft Research Talks
-

Decoding the Human Brain – A Neurosurgeon’s Experience
Speakers:- Pascal Zinn,
- Ivan Tashev
-
-
-
-

Galea: The Bridge Between Mixed Reality and Neurotechnology
Speakers:- Eva Esteban,
- Conor Russomanno
-

Current and Future Application of BCIs
Speakers:- Christoph Guger
-

Challenges in Evolving a Successful Database Product (SQL Server) to a Cloud Service (SQL Azure)
Speakers:- Hanuma Kodavalla,
- Phil Bernstein
-
Improving text prediction accuracy using neurophysiology
Speakers:- Sophia Mehdizadeh
-
-
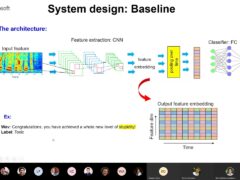
DIABLo: a Deep Individual-Agnostic Binaural Localizer
Speakers:- Shoken Kaneko
-
-

Recent Efforts Towards Efficient And Scalable Neural Waveform Coding
Speakers:- Kai Zhen
-
-
Audio-based Toxic Language Detection
Speakers:- Midia Yousefi
-
-
From SqueezeNet to SqueezeBERT: Developing Efficient Deep Neural Networks
Speakers:- Sujeeth Bharadwaj
-

Hope Speech and Help Speech: Surfacing Positivity Amidst Hate
Speakers:- Monojit Choudhury
-
-
-
-
-
'F' to 'A' on the N.Y. Regents Science Exams: An Overview of the Aristo Project
Speakers:- Peter Clark
-
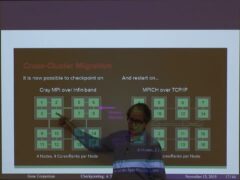
Checkpointing the Un-checkpointable: the Split-Process Approach for MPI and Formal Verification
Speakers:- Gene Cooperman
-

Learning Structured Models for Safe Robot Control
Speakers:- Ashish Kapoor
-