
Meta Reinforcement Learning with Latent Variable Gaussian Processes
- Steindór Sæmundsson ,
- Katja Hofmann ,
- Marc Peter Deisenroth
Conference on Uncertainty in Artificial Intelligence (UAI) |
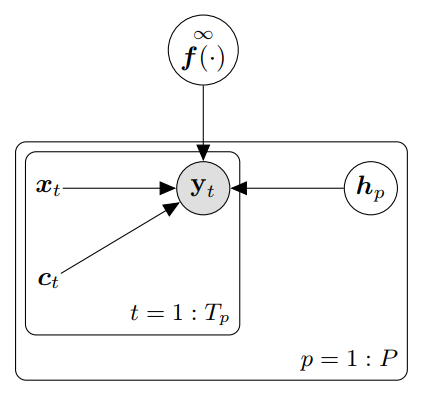
Data efficiency, i.e., learning from small data sets, is critical in many practical applications where data collection is time consuming or expensive, e.g., robotics, animal experiments or drug design. Meta learning is one way to increase the data efficiency of learning algorithms by generalizing learned concepts from a set of training tasks to unseen, but related, tasks. Often, this relationship between tasks is hard coded or relies in some other way on human expertise. In this paper, we propose to automatically learn the relationship between tasks using a latent variable model. Our approach finds a variational posterior over tasks and averages over all plausible (according to this posterior) tasks when making predictions. We apply this framework within a model-based reinforcement learning setting for learning dynamics models and controllers of many related tasks. We apply our framework in a model-based reinforcement learning setting, and show that our model effectively generalizes to novel tasks, and that it reduces the average interaction time needed to solve tasks by up to 60% compared to strong baselines.