
Privacy Preserving Image Queries for Camera Localization
- Pablo Speciale ,
- Johannes L. Schönberger ,
- Sudipta Sinha ,
- Marc Pollefeys
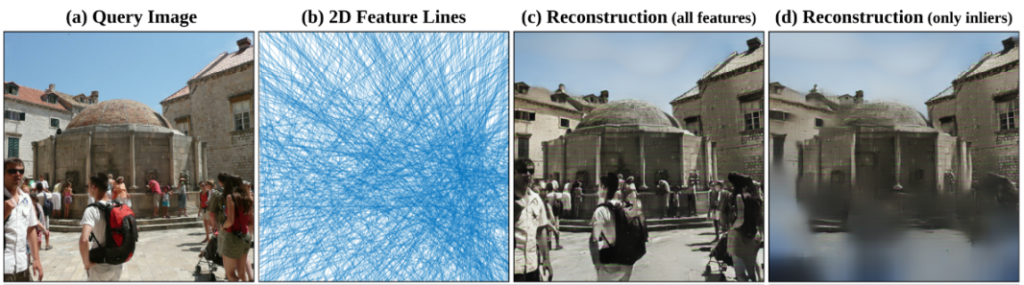
Augmented/mixed reality and robotic applications are increasingly relying on cloud-based localization services, which require users to upload query images to perform camera pose estimation on a server. This raises significant privacy concerns when consumers use such services in their homes or in confidential industrial settings. Even if only image features are uploaded, the privacy concerns remain as the images can be reconstructed fairly well from feature locations and descriptors. We propose to conceal the content of the query images from an adversary on the server or a man-in-the-middle intruder. The key insight is to replace the 2D image feature points in the query image with randomly oriented 2D lines passing through their original 2D positions. It will be shown that this feature representation hides the image contents, and thereby protects user privacy, yet still provides sufficient geometric constraints to enable robust and accurate 6-DOF camera pose estimation from feature correspondences. Our proposed method can handle single- and multi-image queries as well as exploit additional information about known structure, gravity, and scale. Numerous experiments demonstrate the high practical relevance of our approach.